Oral
Interventional, Multimodal & Auxiliary Engineering
ISMRM & SMRT Annual Meeting • 15-20 May 2021

Oral
Interventional, Multimodal & Auxiliary Engineering
| Concurrent 3 | 18:00 - 20:00 | Moderators: Felipe Godinez & Viola Rieke |
0853.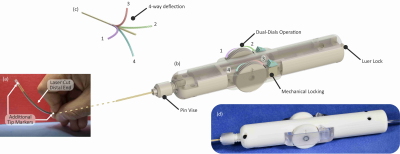 |
An MR Safe Steerable Catheter for MR-guided Endovascular Interventions
Mohamed E. M. K. Abdelaziz1, Libaihe Tian1, Thomas Lottner2, Simon Reiss2, Klaus Düring3, Guang-Zhong Yang4, Michael Bock2, and Burak Temelkuran1
1Hamlyn Centre for Robotic Surgery, Imperial College London, London, United Kingdom, 2Dept. of Radiology, Medical Physics, Medical Center, University of Freiburg, Freiburg, Germany, 3MaRVis Interventional GmBH, Krün, Germany, 4Shanghai Jiao Tong University, Shanghai, China
MR-guided intravascular interventions often lack steerable devices due to potential RF heating of long metallic components. In this study, we present a novel 7F MR safe and passively visible steerable catheter. Real-time MR image guidance of this catheter was demonstrated in a vessel phantom in a clinical 3T MR scanner to evaluate the catheter’s mechanical efficacy and MR visibility. Small vascular structures such as the renal artery could be probed efficiently with the polymer-only based catheter. With the integrated iron markers it was visible in its entirety, and the limited artifact size allowed for the effective visualization of surrounding tissue.
|
||
0854. |
Real-Time Slice Steering for MR-Guided Interventions Using Endovascular Devices Equipped with Passive MRI Markers
Daniel Christopher Hoinkiss1, Han Nijsink2, Paul Borm3, Sabrina Haase1, Jan Strehlow1, Jurgen Futterer2, and Torben Pätz1
1Fraunhofer Institute for Digital Medicine MEVIS, Bremen, Germany, 2Radboud University Medical Centre (Radboudumc), Nijmegen, Netherlands, 3Nano4imaging GmbH, Aachen, Germany
MR-guided endovascular interventions will enable widely distributed therapies to be performed without radiation. We present a workflow for interventional slice steering based on endovascular device tracking to increase the precision during MR-guided interventions. Merging real-time tracking information based on passive MRI markers with pre-calculated therapy planning allows the slice steering to automatically adjust itself to the predicted vessel pathways for smooth and accurate device monitoring.
|
||
0855. |
Minimal Artifact Actively Shimmed Metallic Needles for Interventional MRI
Saikat Sengupta1, Xinqiang Yan1, Tamarya Hoyt2, Anthony Gunderman3, and Yue Chen3
1Department of Radiology, Vanderbilt University Institute of Imaging Science, Nashville, TN, United States, 2Department of Radiology, Vanderbilt University Medical Center, Nashville, TN, United States, 3Department of Mechanical Engineering, University of Arkansas, Fayetteville, AR, United States
Artifacts caused by large magnetic susceptibility differences between metallic probes and the surrounding tissue are a persistent problem in many interventional MRI applications. In previous work, we presented the concept, design and modeling of active shims for metallic needles. In this work, we present the experimental demonstration of recovery of metallic probe induced signal loss at 3 Tesla. Effective recovery of lost signal and correction of field inhomogeneity is shown across needle orientations and imaging sequences.
|
||
0856.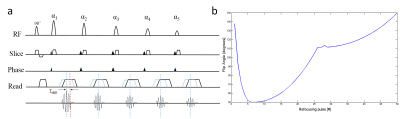 |
In Vivo Susceptibility-based Positive Contrast Imaging of MR Compatible Metallic Devices Based on Modified Slab-Selective 3D SPACE Sequence
Caiyun Shi1,2, Dong Liang1,2,3, Zhilang Qiu1, Xin Liu1,2, Yanjie Zhu1,2, and Haifeng Wang1,2
1Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen, China, 2Shenzhen College of Advanced Technology, University of Chinese Academy of Sciences, Shenzhen, China, 3Research Centre for Medical AI, Shenzhen Institutes of Advanced Technology, Chinese Academy of Science, Shenzhen, China
Susceptibility-based positive contrast MR imaging exhibits excellent efficacy for visualizing the MR compatible metallic devices, by taking advantage of their high magnetic susceptibility. In this work, a novel method is developed to realize the 3D susceptibility-based positive contrast MR imaging on in vivo experiments of one human patient with one tumour of the scapula. The method is based on a modified 3D SPACE sequence and a PDF background field removal to achieve positive contrast imaging.
|
||
0857.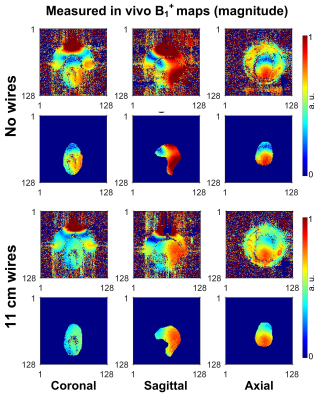 |
Improvements in in vivo imaging and temperature mapping using passive “propeller-beanie” antenna in transcranial MR-guided focused ultrasound
Xinqiang Yan1,2, Steven P. Allen3, Craig H. Meyer3, and William A. Grissom1,2,4
1Vanderbilt University Institute of Imaging Science, Nashville, TN, United States, 2Department of Radiology and Radiological Sciences, Vanderbilt University Medical Center, Nashville, TN, United States, 3Department of Biomedical Engineering, University of Virginia, Charlottesville, VA, United States, 4Department of Biomedical Engineering, Vanderbilt University, Nashville, TN, United States
Transcranial MR-guided focused ultrasound (tcMRgFUS) neurosurgery is a non-invasive treatment for essential tremor and many emerging applications. In FDA-approved Insightec tcMRgFUS system, however, RF reflections create curved dark bands in brain images. In this work, we reported the first B1+ and temperature maps in a healthy volunteer with passive crossed wires to alleviate B1+ dark bands and inhomogeneity in a tcMRgFUS system. Consistent with simulation results and previous experimental results in phantoms, the “propeller-beanie” antenna can significantly alleviate dark band artifacts in Insightec tcMRgFUS system, which improves temperature precision and may enable the use of diffusion imaging to monitor treatment.
|
||
 |
0858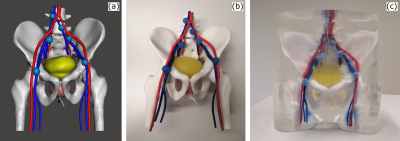 |
An Anthropomorphic Pelvis Phantom for Prostate Brachytherapy and Biopsy Video Permission Withheld
Dominik F. Bauer1,2, Eva Oelschlegel1,2, Alena-Kathrin Golla1,2, Anne Adlung1,2, Tom Russ1,2, Ingo Hermann1,2, Irène Brumer1,2, Julian Rosenkranz3, Fabian Tollens4, Sven Clausen5, Philipp Aumüller5, Lothar R. Schad1,2, Dominik Nörenberg4,
and Frank G. Zöllner1,2
1Computer Assisted Clinical Medicine, Medical Faculty Mannheim, Heidelberg University, Mannheim, Germany, 2Mannheim Institute for Intelligent Systems in Medicine, Medical Faculty Mannheim, Heidelberg University, Mannheim, Germany, 3Fraunhofer Institute for Manufacturing Engineering and Automation, Project Group for Automation in Medicine and Biotechnology, Mannheim, Germany, 4Department of Radiology and Nuclear Medicine, University Medical Center Mannheim, Mannheim, Germany, 5Department of Radiation Oncology, University Medical Center Mannheim, Heidelberg University, Mannheim, Germany
We present an anthropomorphic pelvis phantom with lesions for transperineal and transrectal prostate needle interventions. The human-sized artificial pelvis includes bones, bladder, prostate with four lesions, urethra, arteries, veins and six lymph nodes embedded in ballistic gelatin. It is puncturable and shows realistic contrast in multiparametric MRI (mpMRI) as well as CT imaging. The phantom can be used for the evaluation, training and finetuning of multimodal prostatic intervention procedures, such as prostate brachytherapy and biopsy.
|
|
 |
0859.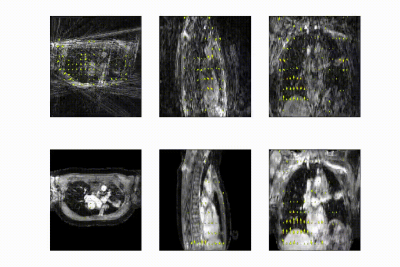 |
A generic framework for real-time 3D motion estimation from highly undersampled k-space using deep learning
Maarten Terpstra1,2, Matteo Maspero1,2, Tom Bruijnen1,2, Joost Verhoeff1, Jan Lagendijk1, and Cornelis A.T. van den Berg1,2
1Department of Radiotherapy, University Medical Center Utrecht, Utrecht, Netherlands, 2Computational Imaging Group for MR diagnostics & therapy, University Medical Center Utrecht, Utrecht, Netherlands
Motion estimation from MRI is important for image-guided radiotherapy. Specifically, for online adaptive MR-guided radiotherapy, the motion fields need to be available with high temporal resolution and a low latency. To achieve the required speed, MR acquisition is generally heavily accelerated, which results in image artifacts. Previously we have presented a deep learning method for real-time motion estimation in 2D that is able to resolve image artifacts. Here, we extend this method to 3D by training on prospectively undersampled respiratory-resolved data showing that our method produces high-quality motion fields at R=30 and even generalizes to CT without retraining.
|
|
|
0860.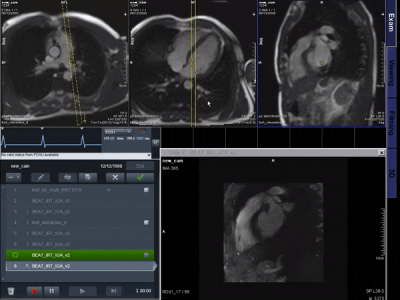 |
Real-time deep artifact suppression using recurrent U-nets for interactive Cardiac Magnetic Resonance imaging.
Olivier Jaubert1,2, Javier Montalt-Tordera2, Dan Knight2,3, Gerry J. Coghlan2,3, Simon Arridge1, Jennifer Steeden2, and Vivek Muthurangu2
1Department of Computer Science, UCL, London, United Kingdom, 2Centre for Cardiovascular Imaging, UCL, London, United Kingdom, 3Department of Cardiology, Royal Free London NHS Foundation Trust, London, United Kingdom
MR guided catheterization requires both fast imaging and fast reconstruction techniques for interactive imaging. Recent deep learning methods outperformed classical iterative reconstructions with shorter reconstruction times. We propose a low latency framework relying on deep artefact suppression using a 2D residual U-Net with convolutional long short term memory layers trained on multiple orientations. The framework was demonstrated to reconstruct an interactively acquired bSSFP tiny golden angle radial sequence for catheter guidance. The proposed approach enabled real-time imaging (latency/network time=39/19ms) in 3 catheterized patients with promising image quality and reconstruction times.
|
|
|
0861.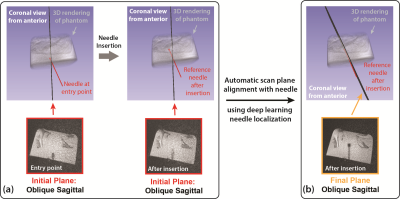 |
Deep Learning-Driven Automatic Scan Plane Alignment for Needle Tracking in MRI-Guided Interventions
Xinzhou Li1,2, Yu-Hsiu Lee3, David S. Lu1, Tsu-Chin Tsao3, and Holden H. Wu1,2
1Radiological Sciences, University of California, Los Angeles, Los Angeles, CA, United States, 2Bioengineering, University of California, Los Angeles, Los Angeles, CA, United States, 3Mechanical and Aerospace Engineering, University of California, Los Angeles, Los Angeles, CA, United States
Misalignment between the MRI scan plane and needle trajectory degrades visualization and localization of the needle. This may prolong procedure time and increase errors in MRI-guided interventions. By leveraging an accurate deep learning-based needle localization algorithm, this work proposed an automatic workflow to realign the MRI scan plane with the needle. A scan plane control module was implemented for scan parameter updates. In one degree-of-freedom needle insertion experiments, the automatic workflow accurately aligned the scan plane with the needle (orientation difference 1.9°) with processing time <2 sec.
|
|
0862. |
Ultra-quality 4D-MRI synthesis using deep learning-based deformable image registration
Haonan Xiao1, Tian Li1, Jiang Zhang1, Ruiyan Ni1, Ge Ren1, Yibao Zhang2, Weiwei Liu2, Weihu Wang2, Hao Wu2, Victor Lee3, Andy Cheung3, Hing-Chiu Chang3, and Jing Cai1
1The Hong Kong Polytechnic University, Hong Kong, China, 2Key Laboratory of Carcinogenesis and Translational Research (Ministry of Education/Beijing), Department of Radiation Oncology, Peking University Cancer Hospital & Institute, Beijing, China, 3The University of Hong Kong, Hong Kong, China
We have developed and validated an ultra-quality 4D-MRI synthesis technique using deep learning-based deformable image registrations. The displacement vector fields between breathing frames were obtained from low-quality 4D-MRI. They were then applied to high-quality stationary T1, T2, and diffusion weighted images to generate ultra-quality 4D-MRI. The synthetic 4D-MRIs were verified in terms of tumor motion accuracy and image quality. All the motion errors were in a sub-voxel level, and the image quality was significantly improved. This technique holds great potential in volumetric tumor tracking with high accuracy.
|
The International Society for Magnetic Resonance in Medicine is accredited by the Accreditation Council for Continuing Medical Education to provide continuing medical education for physicians.