Fikunwa O. Kolawole1,2, Tyler Edward Cork2,3,4, Michael Loecher2,3, Judith Zimmermann3,5, Seraina A. Dual3, Marc E. Levenston1,3, and Daniel B. Ennis2,3
1Mechanical Engineering, Stanford University, Stanford, CA, United States, 2Radiology, Veterans Administration Health Care System, Palo Alto, CA, United States, 3Radiology, Stanford University, Stanford, CA, United States, 4Bioengineering, Stanford University, Stanford, CA, United States, 5Computer Science, Technical University of Munich, Garching, Germany
1Mechanical Engineering, Stanford University, Stanford, CA, United States, 2Radiology, Veterans Administration Health Care System, Palo Alto, CA, United States, 3Radiology, Stanford University, Stanford, CA, United States, 4Bioengineering, Stanford University, Stanford, CA, United States, 5Computer Science, Technical University of Munich, Garching, Germany
We describe a 3D-printed phantom heart setup that enables
acquisition of the data needed to estimate myocardial stiffness: phantom geometry,
loading pressures, boundary conditions, and filling strains. The setup is
designed to enable validation of myocardial stiffness estimation methods.
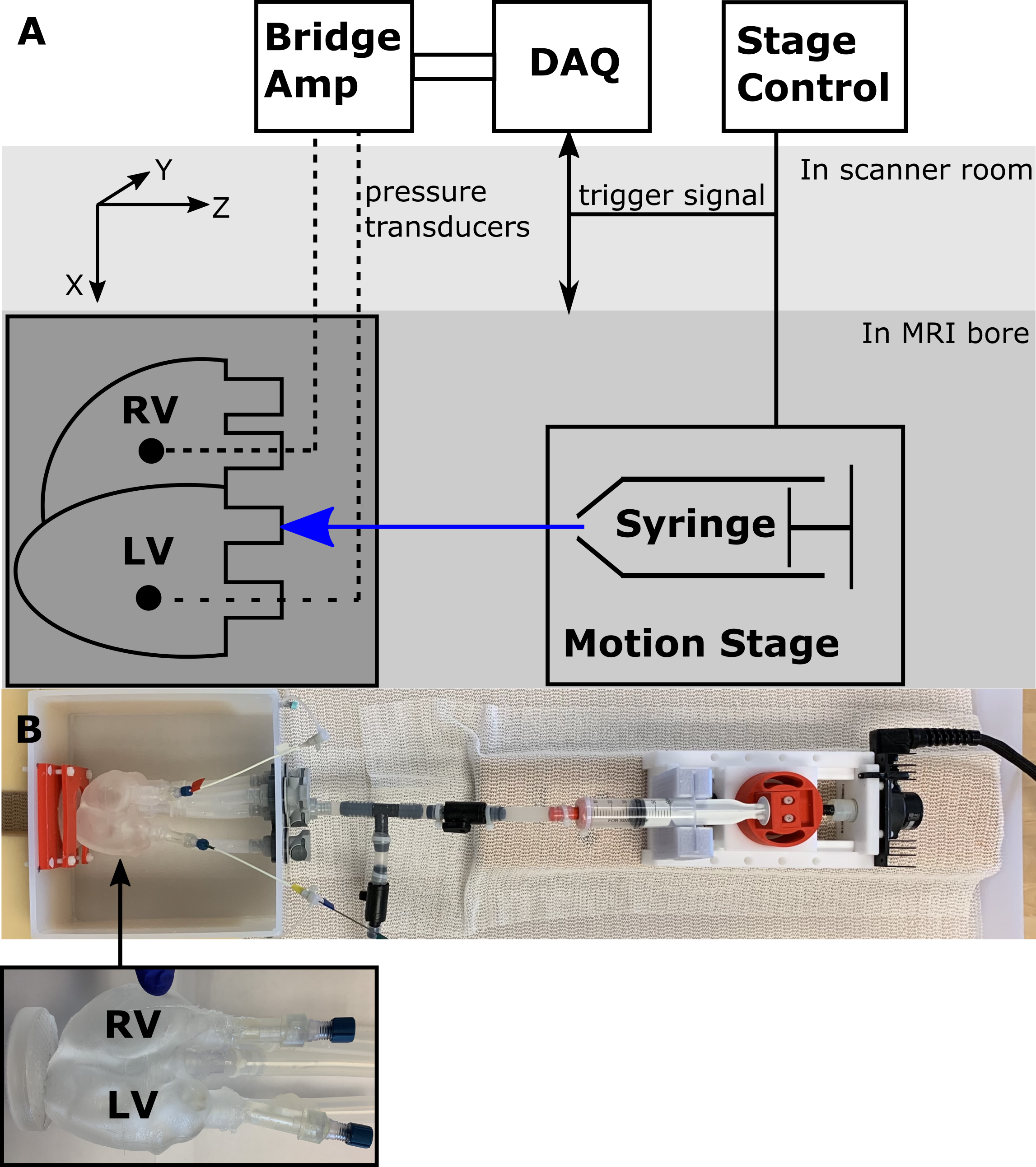
(A) Schematic of experimental setup (B) Picture of experimental setup with heart phantom highlighted.
The RV is kept at a constant volume with reference pressure set to mimic the relatively smaller pressures and pressure variations in the RV, compared to the LV seen in vivo. Each ventricle is connected in a closed loop. The LV is connected in a closed loop with an inflation system. The fluid volume in each loop is fixed and the MR compatible motion stage is used to actuate a fluid filled syringe within the LV loop, modulating LV pressures and volumes. The phantom is fixed at the apex
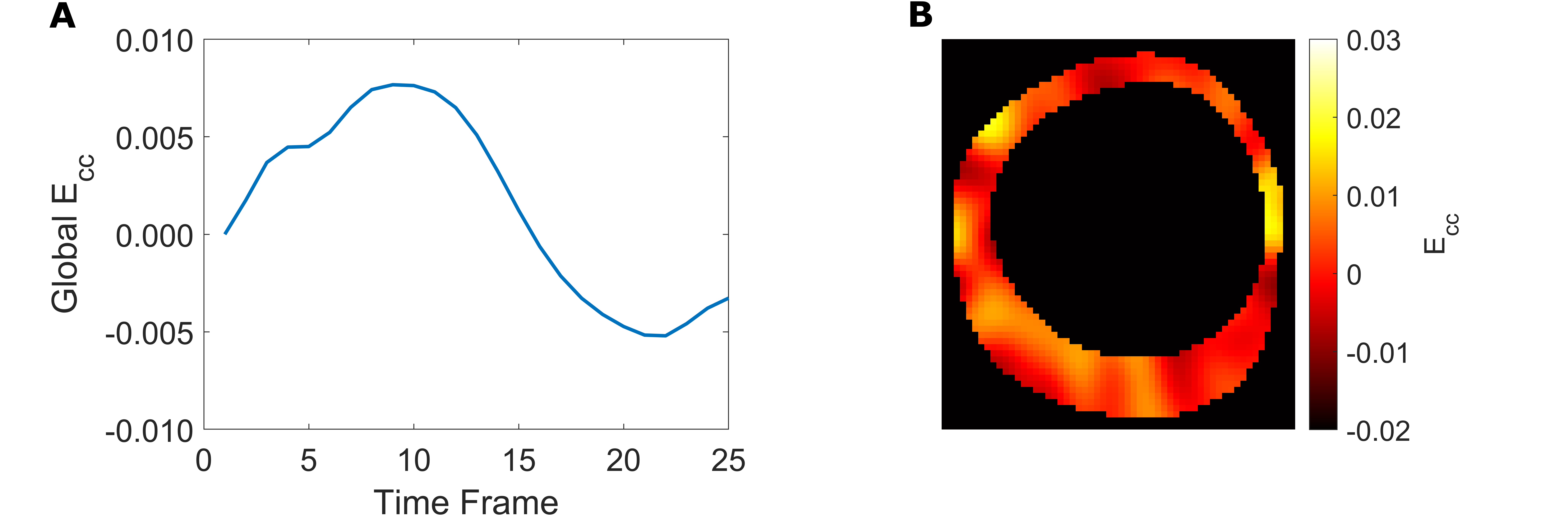
(A) Global LV Ecc.
(B) LV Ecc map at peak Global LV Ecc. Tag lines and tracked
points are indicated in Figure 4. The strain curve accords with the sinusoidal
induced filling volume. The displacements are small but measurable and accord
with the magnitude expected in vivo.
