Tianshu Zheng1, Cong Sun2, Guangbin Wang2, Weihao Zheng1, Wen Shi1, Yi Sun3, Yi Zhang1, Chuyang Ye4, and Dan Wu1
1Key Laboratory for Biomedical Engineering of Ministry of Education, Department of Biomedical Engineering, College of Biomedical Engineering & Instrument Science, Zhejiang University, Hangzhou, Zhejiang, China,, Zhengjiang University, Hangzhou, China, 2Department of Radiology, Shandong Medical Imaging Research Institute, Cheeloo College of Medicine, Shandong University, 324, Jingwu Road, Jinan, Shandong, 250021, People's Republic of China, Shandong University, Jinan, China, 3Department of Radiology 2MR Collaboration, Siemens Healthcare China, Shanghai, China, Siemens Healthcare China, Shanghai, China, 4chool of Information and Electronics, Beijing Institute of Technology, Beijing Institute of Technology, Beijing, China
1Key Laboratory for Biomedical Engineering of Ministry of Education, Department of Biomedical Engineering, College of Biomedical Engineering & Instrument Science, Zhejiang University, Hangzhou, Zhejiang, China,, Zhengjiang University, Hangzhou, China, 2Department of Radiology, Shandong Medical Imaging Research Institute, Cheeloo College of Medicine, Shandong University, 324, Jingwu Road, Jinan, Shandong, 250021, People's Republic of China, Shandong University, Jinan, China, 3Department of Radiology 2MR Collaboration, Siemens Healthcare China, Shanghai, China, Siemens Healthcare China, Shanghai, China, 4chool of Information and Electronics, Beijing Institute of Technology, Beijing Institute of Technology, Beijing, China
We
proposed a Model-driven deep learning neural network based on sparse coding
which reliably predicted the IVIM parameters in the fetal brain with only a
subset of the diffusion data while retaining good interpretability, and
therefore, could potentially accelerate IVIM acquisition.
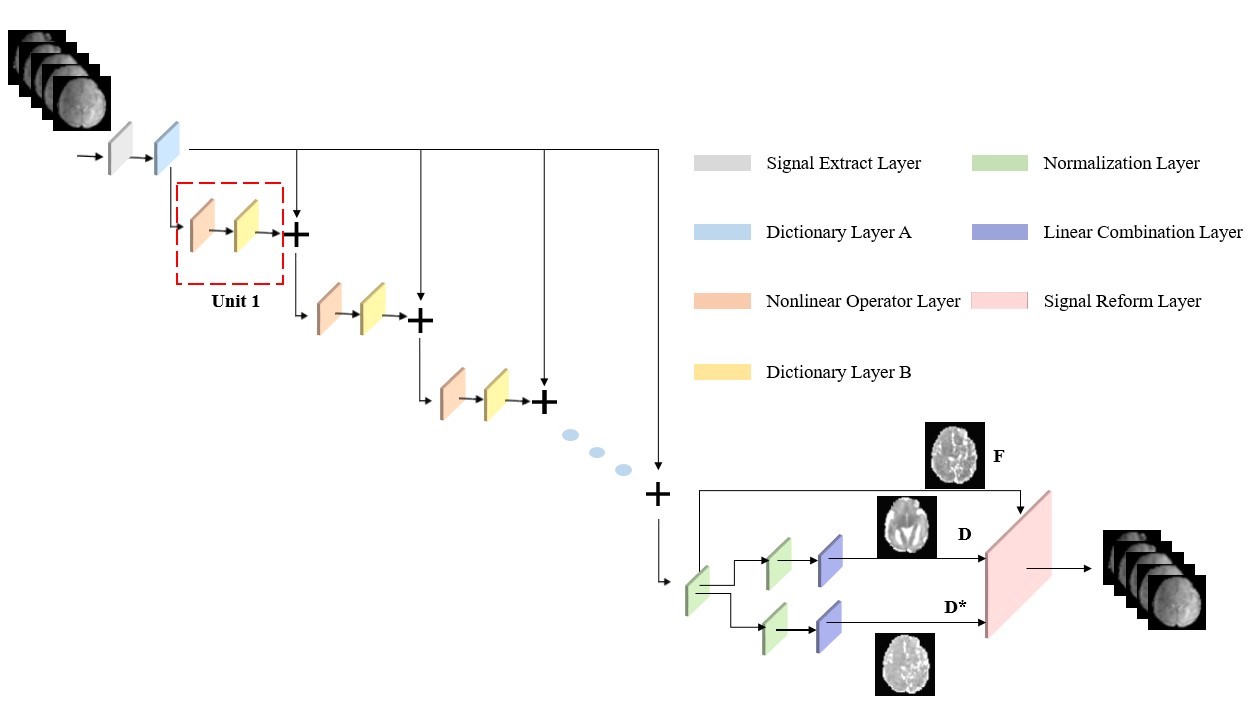
Figure1. Briefly, in the signal extract layer,
signals were extracted from each voxel as the input for
dictionary A. Each unit in the red dashed box
was comprised of a nonlinear operator layer and a dictionary
layer B. We chose ReLU
as the Nonlinear layer. This process was repeated 10 times. Then the output was transferred to the Normalization. [f, D, D*] can be obtained
using the linear combination layer (Eq [4-6]). Lastly, the output parameters
are fed into the signal reform layer according to IVIM model
to reconstruct the signals which are compared with the input as part of the loss function.
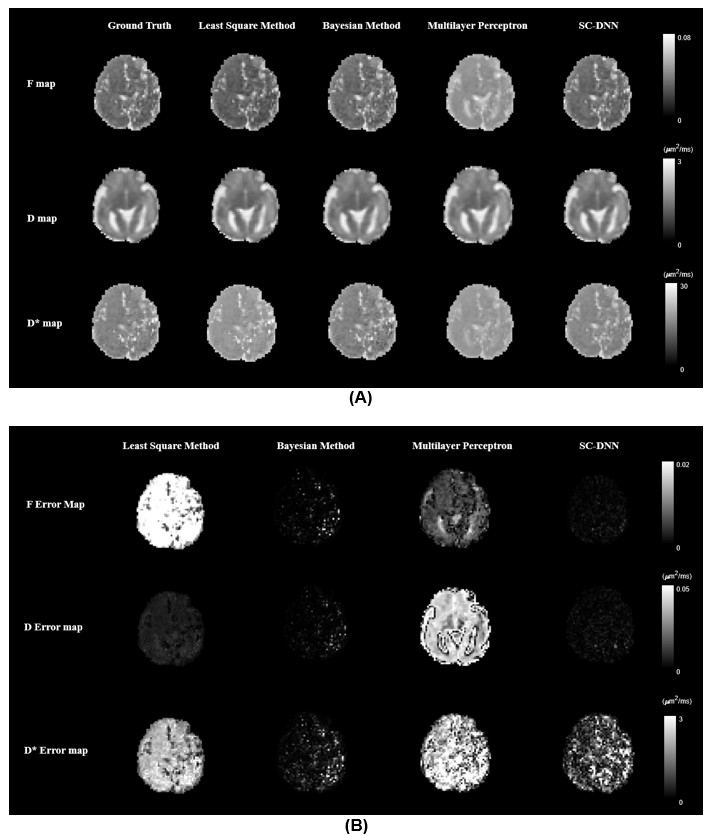
Figure2. (A) Estimated f, D, and D* parameter maps using the
least square or Baysian fitting of the bi-exponential model, multilayer
perceptron, and the proposed SC-DNN. The ground truth was obtained by adding
noise after recovering from the previous parameters according to the IVIM model.
(B) Residual error maps between the fitted parameters and
the ground truth via different methods.