Ke Zhang1, Simon M.F. Triphan1, Felix T. Kurz2, Christian H. Ziener3, Heinz-Peter Schlemmer 3, Hans-Ulrich Kauczor1, and Oliver Sedlaczek1,3
1Department of Diagnostic and Interventional Radiology, Heidelberg University Hospital, Heidelberg, Germany, 2Department of Neuroradiology, Heidelberg University Hospital, Heidelberg, Germany, 3Department of Radiology, German Cancer Research Center, Heidelberg, Germany
1Department of Diagnostic and Interventional Radiology, Heidelberg University Hospital, Heidelberg, Germany, 2Department of Neuroradiology, Heidelberg University Hospital, Heidelberg, Germany, 3Department of Radiology, German Cancer Research Center, Heidelberg, Germany
Navigator-triggered, dual
gradient echo/spin echo EPI based kidney vessel architecture imaging
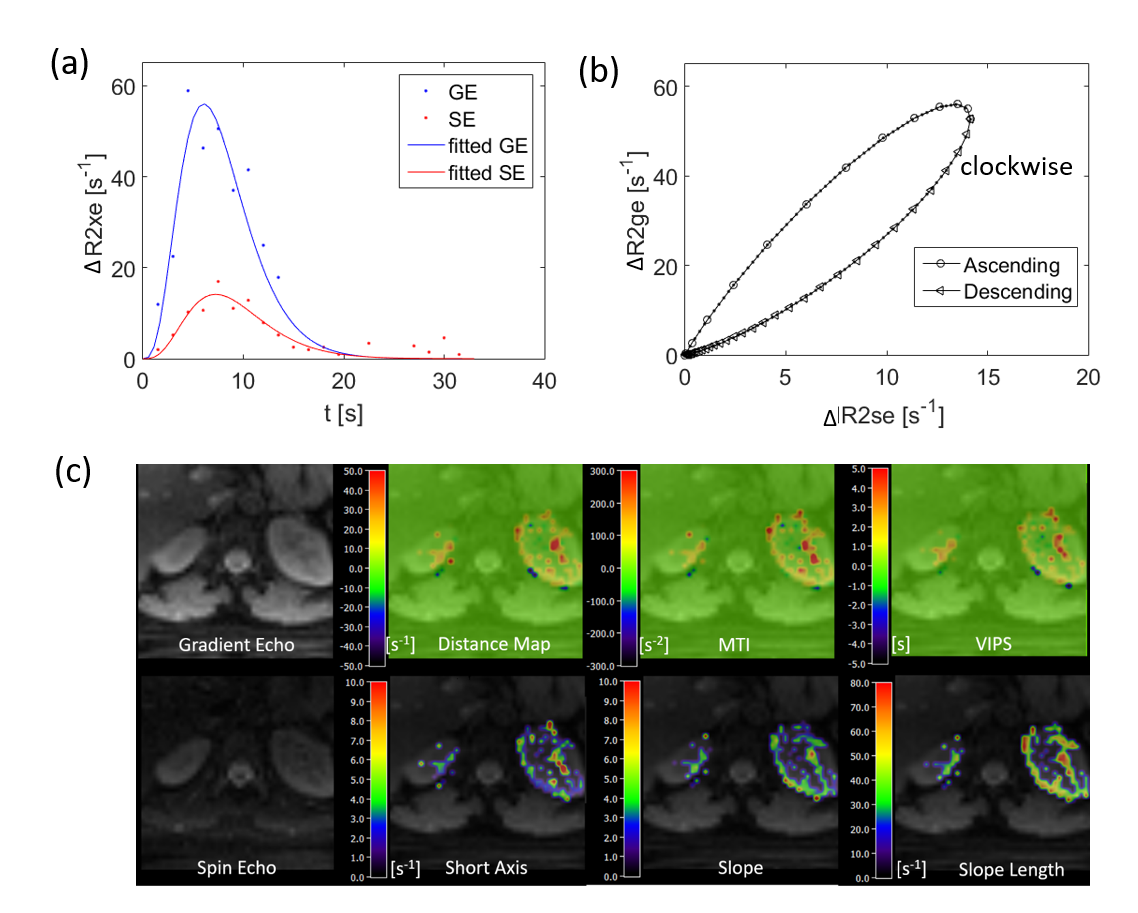
Fig 2. Kidney VAI
results. (a) Gradient echo (GE) and spin echo (SE) relaxation time curves from
a selected pixel. These signals are fitted before calculation of the hysteresis loops. A clockwise hysteresis loop in this case is generated
from the two signal series (b). Six VAI parametric maps are calculated
based on the properties of loops and overlaid on gradient echo images (c).
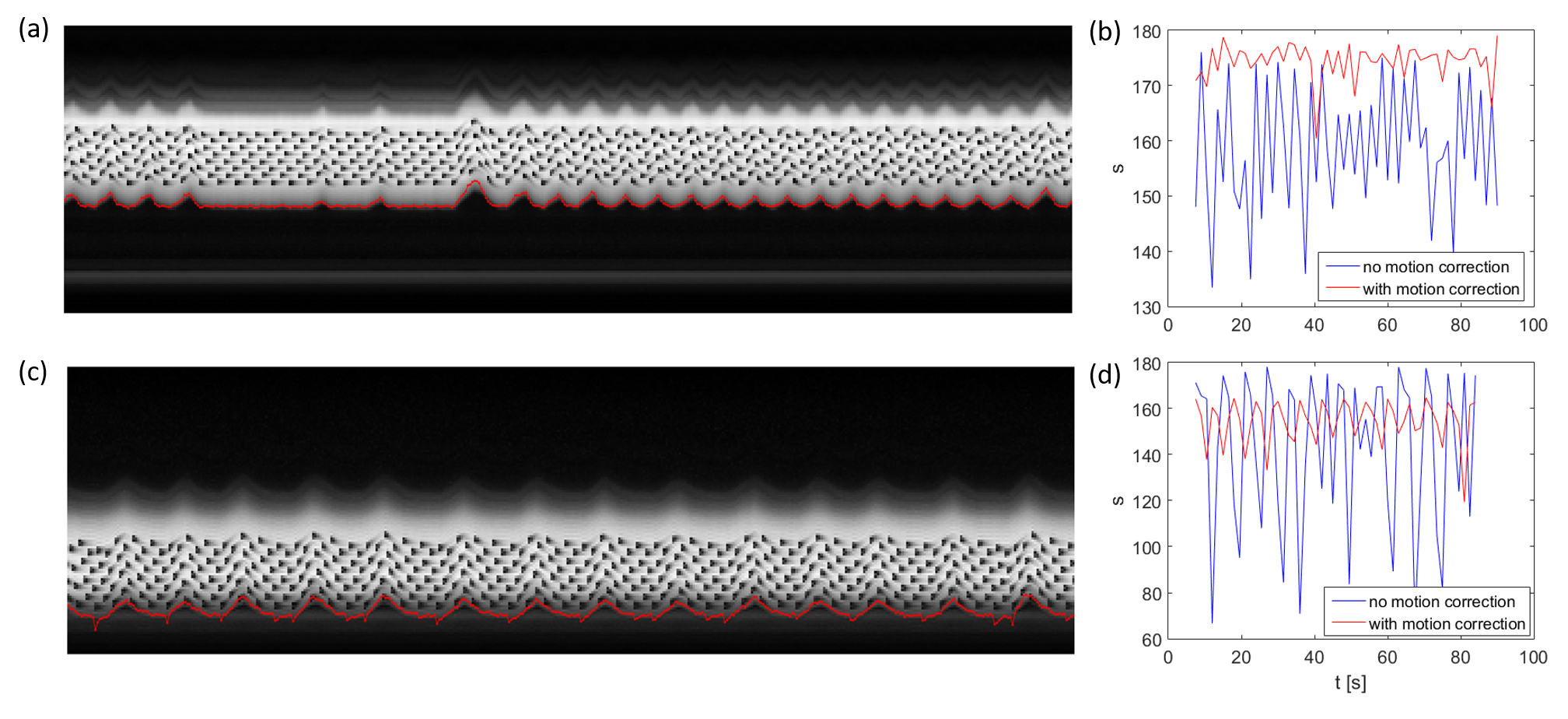
Fig 1. Respiration
motion and motion correction in two heathy subjects (top down). M-mode display
of navigator data showing abdomen motion with respiration (a, c). Note the
signal saturation in the navigator signal caused by imaging slices (a, c).
The
calculated motion information are overlaid (red curve in a and c). Signal of liver in
the last slices are compared before and after motion correction (b, d).