Kevin Blansit1, Tara Retson1, Naeim Bahrami2, Phillip Young3,4, Christopher Francois3, Lewis Hahn1, Michael Horowitz1, Seth Kligerman1, and Albert Hsiao1
1UC San Diego, La Jolla, CA, United States, 2GE Healthcare, Menlo Park, CA, United States, 3Mayo Clinic, Rochester, MN, United States, 4Mayo, Rochester, MN, United States
1UC San Diego, La Jolla, CA, United States, 2GE Healthcare, Menlo Park, CA, United States, 3Mayo Clinic, Rochester, MN, United States, 4Mayo, Rochester, MN, United States
An automated deep learning system is capable of prescribing cardiac imaging planes comparable to those acquired by dedicated cardiac technologists, and is robust across MRIs from multiple sites and field strengths.
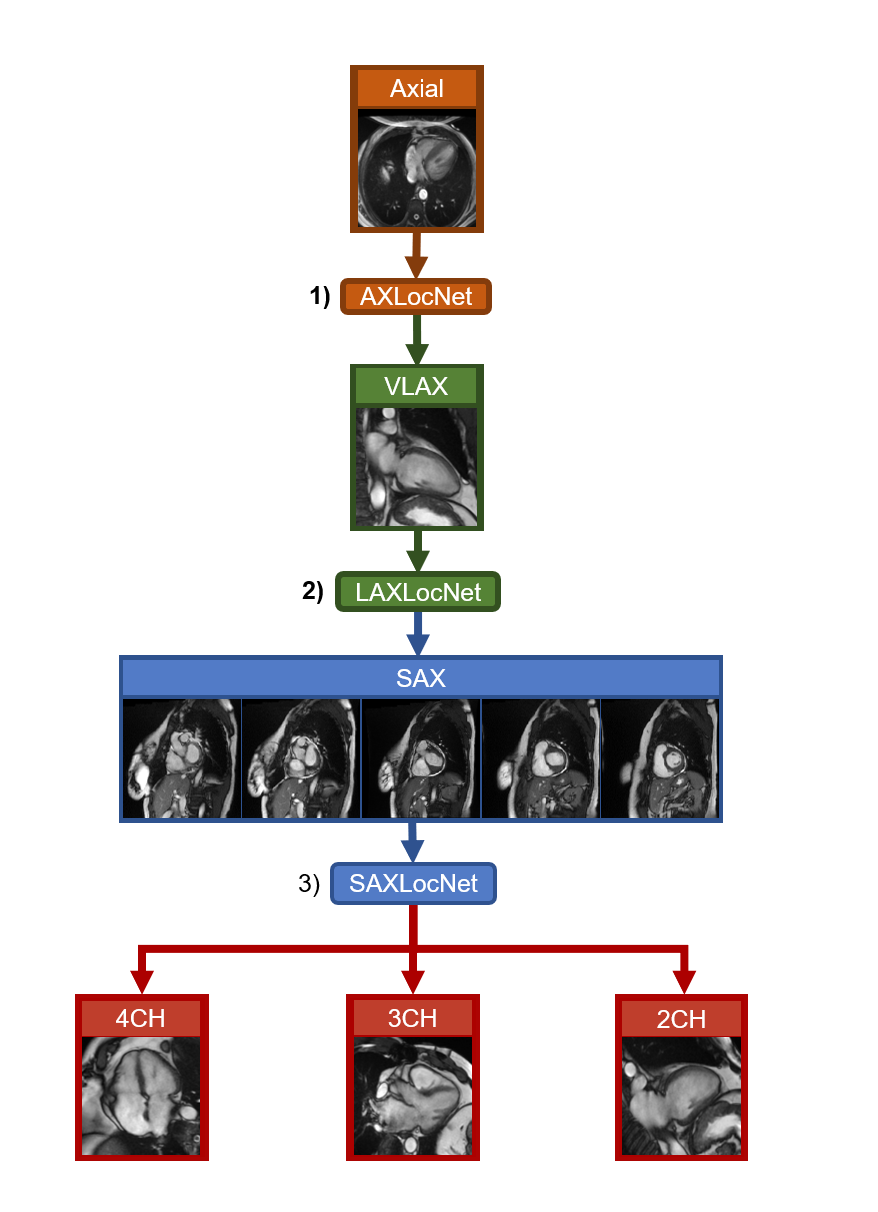
Schematic of automated, multi-stage system for prescribing cardiac imaging planes comprised of DCNN modules. 1) AXLocNet to localize the mitral valve (MV) and apex from the axial stack to prescribe a vertical long-axis, 2) LAXLocNet to localize the MV and apex from long-axis views to prescribe a SAX stack, 3) SAXLocNet to localize the mitral valve, tricuspid valve, and aortic valve to prescribe the 4, 3, and 2-chamber views.
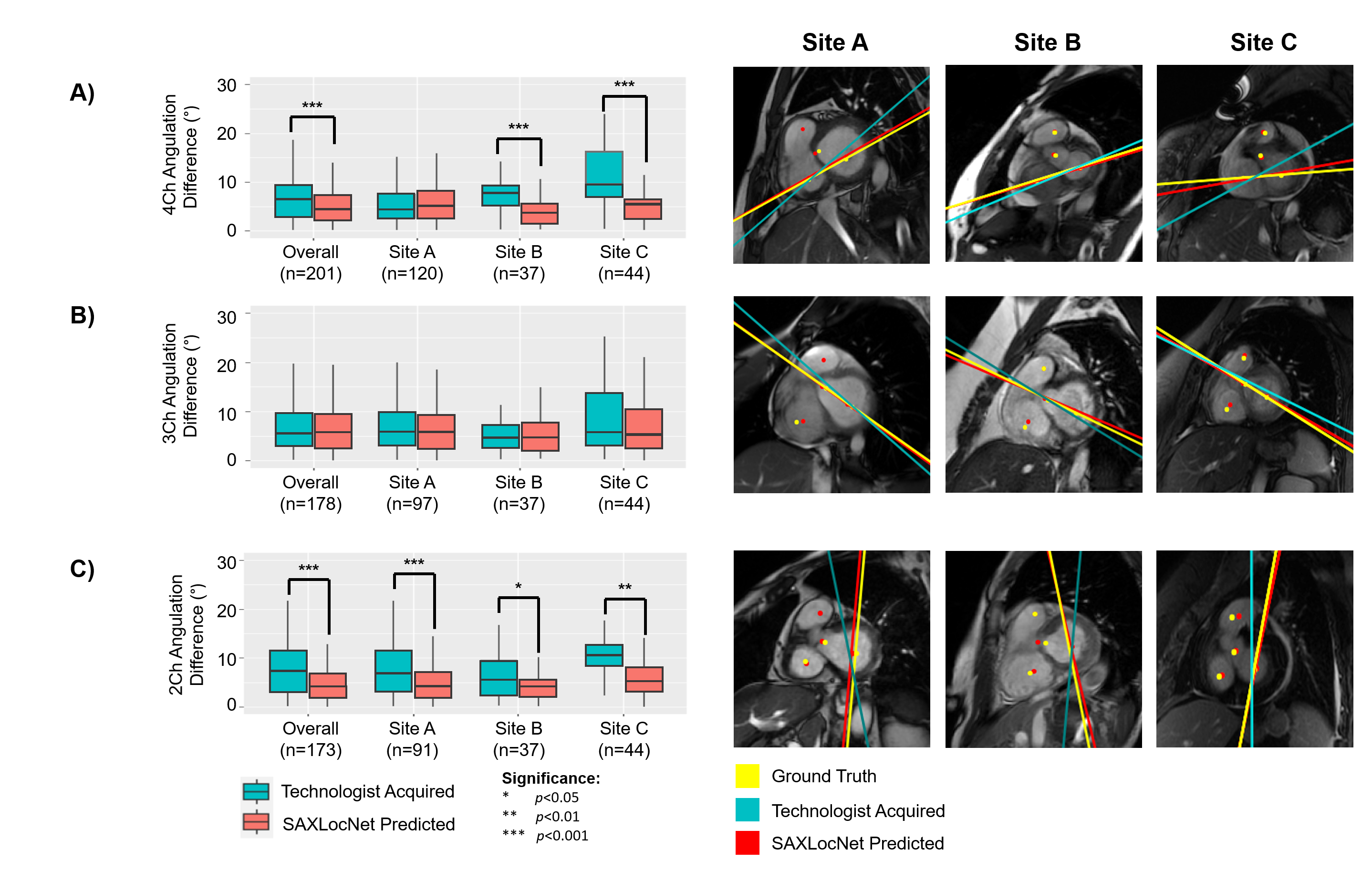
Left: Comparison of plane angulation differences from A) 4-chamber, B) 3-chamber, or C) 2-chamber planes acquired by an MRI technologist (teal) or SAXLocNet (coral).
Right: Exemplar vertical long-axis images displaying radiologist ground truth (yellow), technologist acquired (teal), and SAXLocNet predicted (red) A) 4-chamber, B) 3-chamber, or C) 2-chamber planes. Ground truth and SAXLocNet predicted localizations are shown as dots yellow and red, respectively.