Jing Cheng1, Yuanyuan Liu1, Xin Liu1, Hairong Zheng1, Yanjie Zhu1, and Dong Liang1
1Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen, China
1Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen, China
We
propose a novel deep learning-based framework DEMO for fast and robust MR
parametric mapping. A CS-based loss function is used in DEMO to avoid the necessity of using fully
sampled k-space data as the label, and thus make it an unsupervised learning
approach.
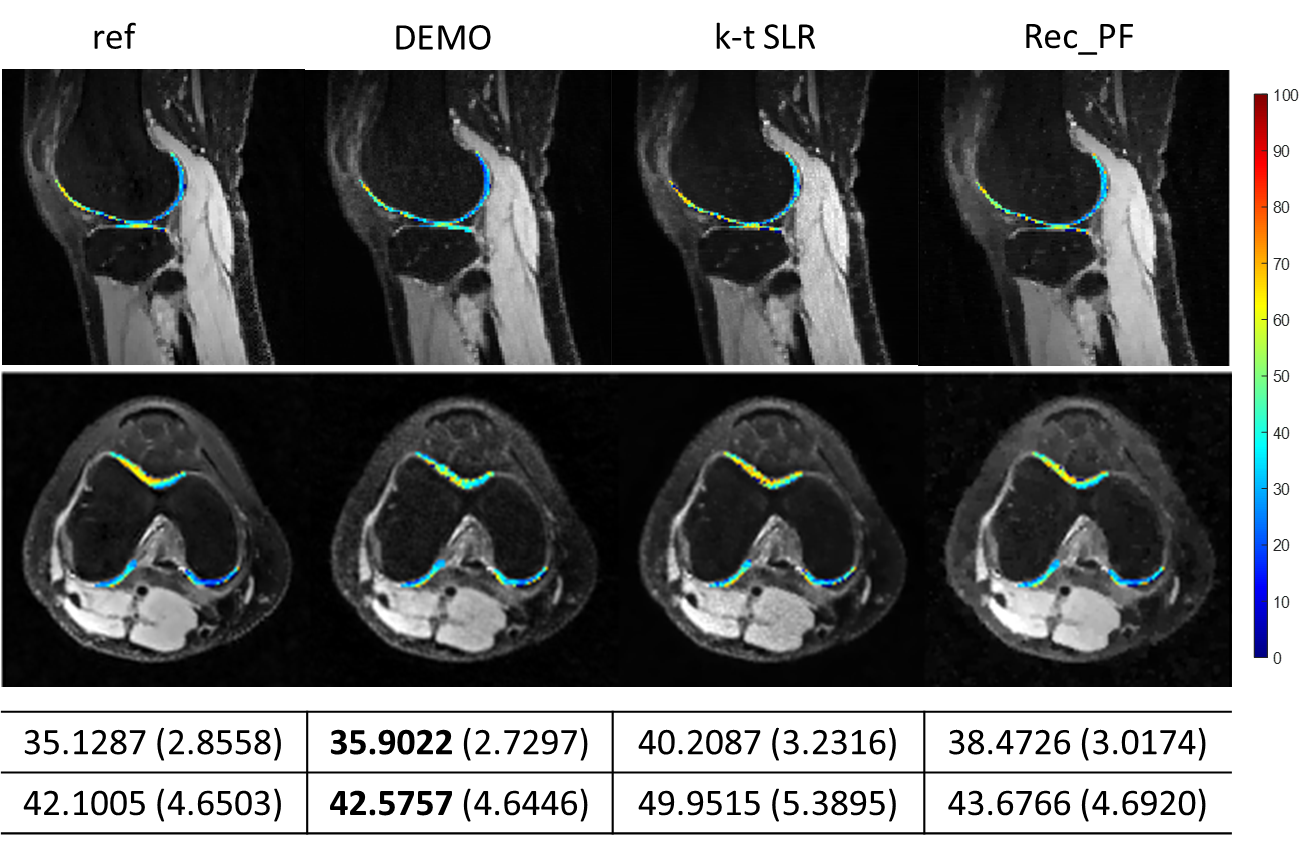
Fig. 4.
The estimated parameter maps for selected cartilage ROIs on
the reconstructed -weighted images at
TSL = 5 ms for R = 5.2. The reference image and the corresponding parameter maps were obtained from the fully
sampled k-space data. The mean values and the standard deviations of the
ROI maps are also provided.
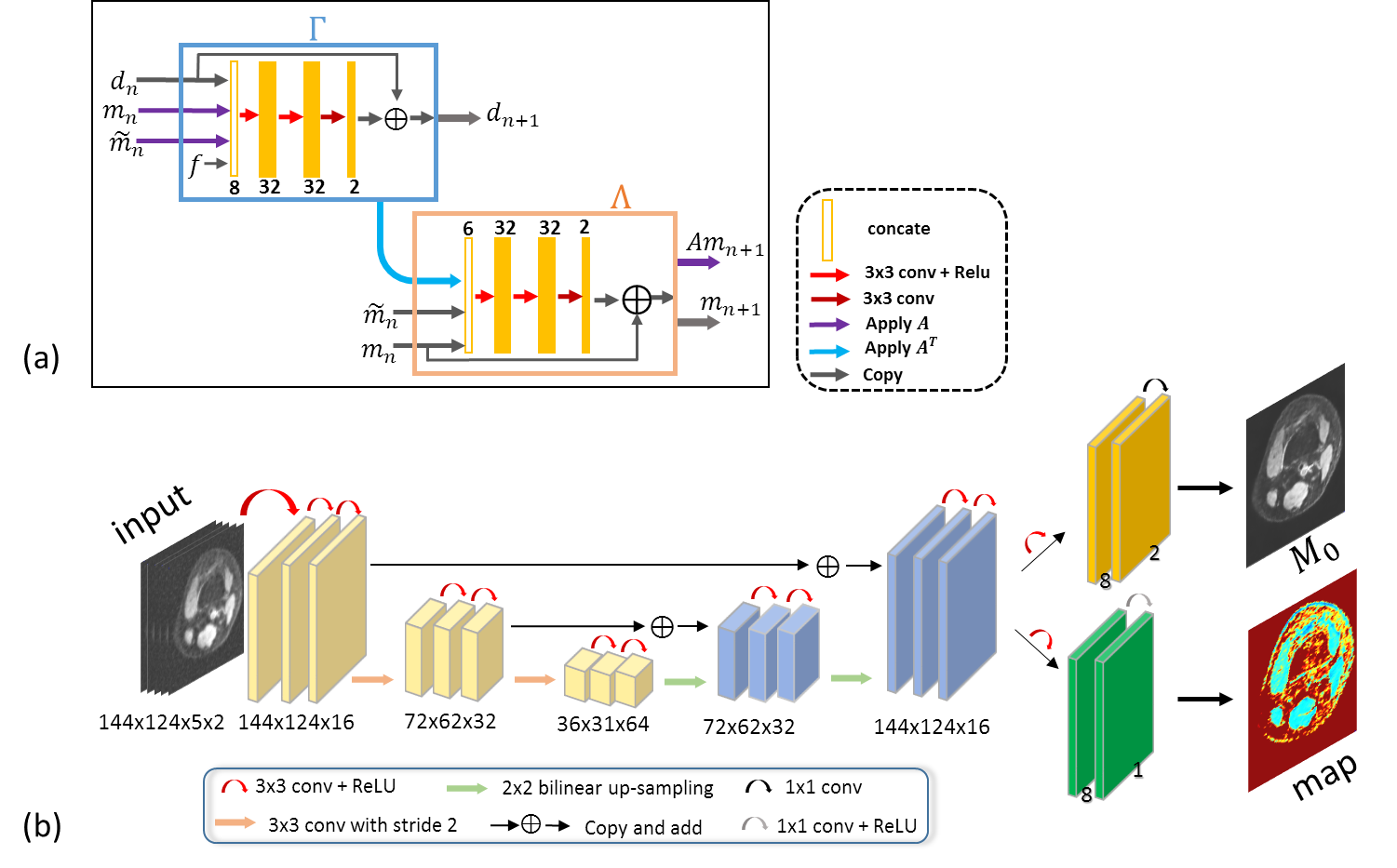
Fig.
2. The architectures of the networks used in DEMO. (a) the n-th
iteration block in Recon-net. (b) the Mapping-net to generate parametric map.
