Guangyu Dan1,2, Min Li3, Mingshuai Wang4, Zheng Zhong1,2, Kaibao Sun1, Muge Karaman1,2, Tao Jiang3, and Xiaohong Joe Zhou1,2,5
1Center for MR Research, University of Illinois at Chicago, Chicago, IL, United States, 2Department of Bioengineering, University of Illinois at Chicago, Chicago, IL, United States, 3Department of Radiology, Beijing Chaoyang Hospital, Capital Medical University, Beijing, China, 4Department of Urology, Beijing Chaoyang Hospital, Capital Medical University, Beijing, China, 5Departments of Radiology and Neurosurgery, University of Illinois at Chicago, Chicago, IL, United States
1Center for MR Research, University of Illinois at Chicago, Chicago, IL, United States, 2Department of Bioengineering, University of Illinois at Chicago, Chicago, IL, United States, 3Department of Radiology, Beijing Chaoyang Hospital, Capital Medical University, Beijing, China, 4Department of Urology, Beijing Chaoyang Hospital, Capital Medical University, Beijing, China, 5Departments of Radiology and Neurosurgery, University of Illinois at Chicago, Chicago, IL, United States
By using multi-task learning, 3D deep
residual convolutional neural network yielded an excellent and stable prostate
cancer detection performance in peripheral zone (AUC of 0.990±0.008) and transitional zone (AUC
of 0.983±0.016) with high b-value
diffusion MRI.
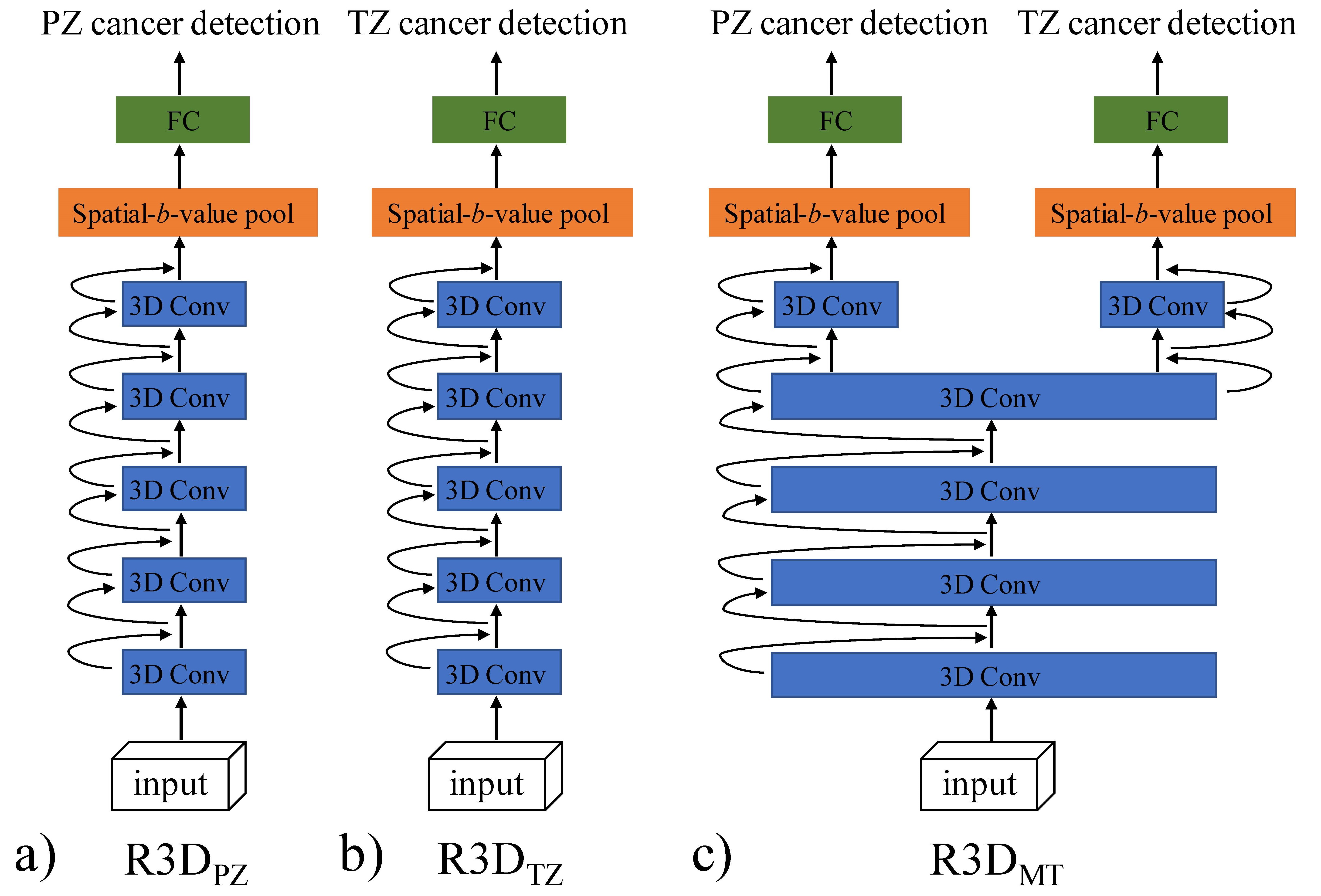
Figure 2. 3D deep
residual neural network architecture for prostate cancer detection in this study.
(a) R3DPZ for prostate cancer detection in PZ. (b) R3DTZ for
prostate cancer detection in TZ. (c) Multi-task R3D (R3DMT) for
prostate cancer detection in both PZ and TZ. The input is a 32×32×11
spatial-b-value volume. Each “3D Conv” block consists of two 3D
convolutional residual layers. The black arrows represent the shortcut
connection.
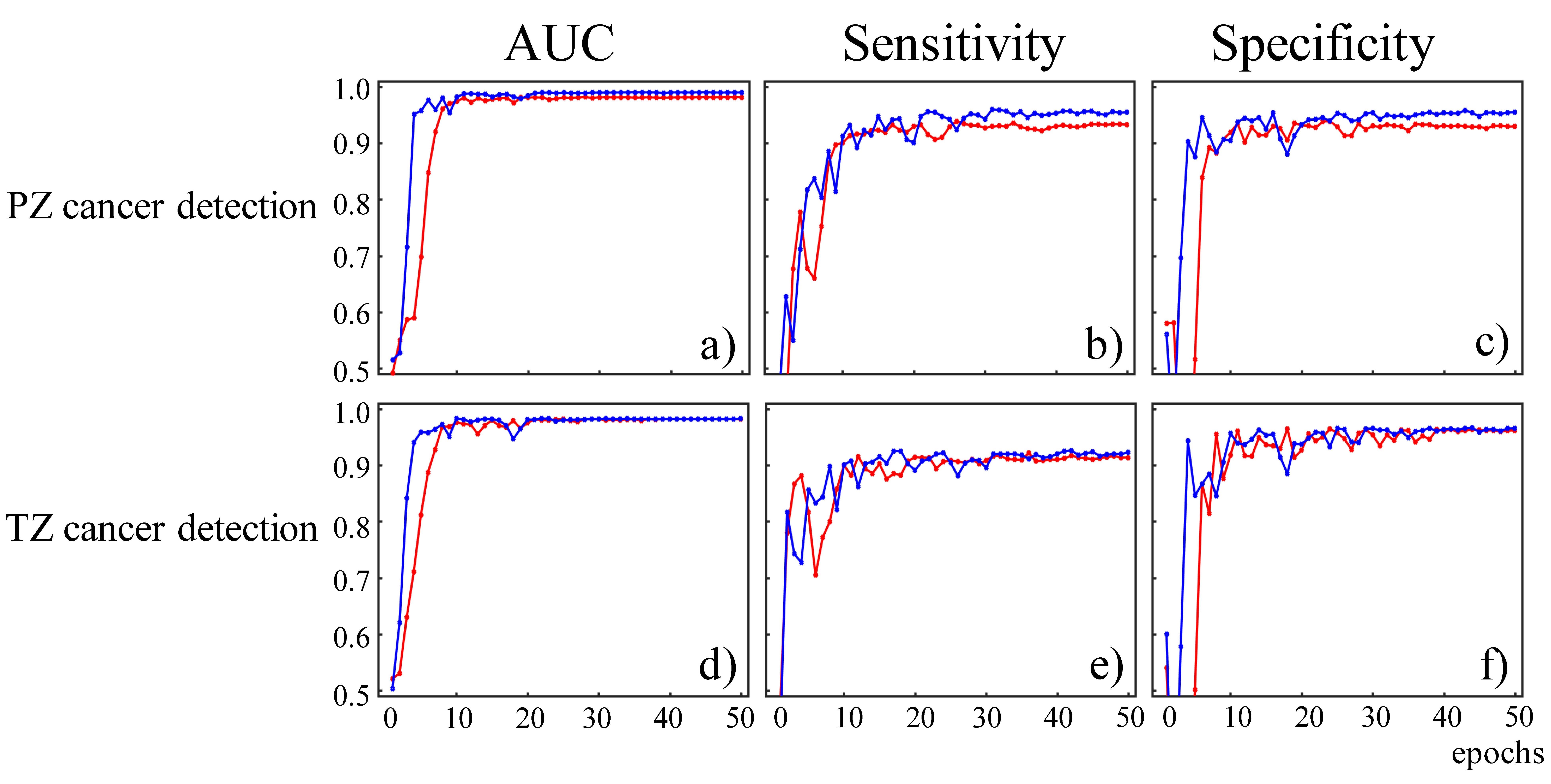
Figure 3. Mean
AUC, sensitivity, and specificity as a function of epoch number for PZ cancer
detection (a, b, and c) and TZ cancer detection (d, e, and f) on testing data.
The blue curve represents multi-task R3D learning, R3DMT,
the red curve represents R3D learning, R3DPZ,
in the first row or R3DTZ in the second row.